by Erh-Ya (Asa) Tsui
 Hamlyn Centre researchers proposed an ergonomic shared workspace analysis framework, aiming to aid the procedures of minimally invasive surgery.
Hamlyn Centre researchers proposed an ergonomic shared workspace analysis framework, aiming to aid the procedures of minimally invasive surgery.n recent years, we have seen the increasing use of Robot-Assisted Surgery for Minimally Invasive Surgery (RAMIS). To this end, the master-slave paradigm is used extensively for human-robot interaction (HRI), where a master controller is employed to seamlessly relay a surgeons manoeuvre to the slave robot.
A master control console is an interface where robots collaborate with humans in a shared environment. To assist the operator to perform a precise manipulation task, analysis of the human-robot workspace for Interaction can provide ergonomic support to help human reduce fatigue.
Although one of relevant studies has provided the potential solutions for surgeons to maintain a good body posture during robot-assisted surgery that are specifically for the console of the daVinci Surgical System, the master manipulators for this surgical system have not been taken into account.
On the other hand, when it comes to realise safe and precise operation for surgical robot remote control, other research that analysed hand motions of operators did not consider the mutual effects brought by the human operator, master and slave robots, leading to a general model.
As a matter of fact, the slave robot cannot reach its full potential if paired with an unsuitable master manipulator. The configuration, as well as the placement of the master manipulators, can influence the remote control performance.
An Ergonomic Shared Workspace Analysis Framework for the Optimal Placement of a Compact Master Control ConsoleIn light of this, our research team at the Hamlyn Centre proposed an ergonomic shared workspace analysis framework. Combined with the workspace of the master manipulators and the human arms, the human-robot interaction workspace can be generated.
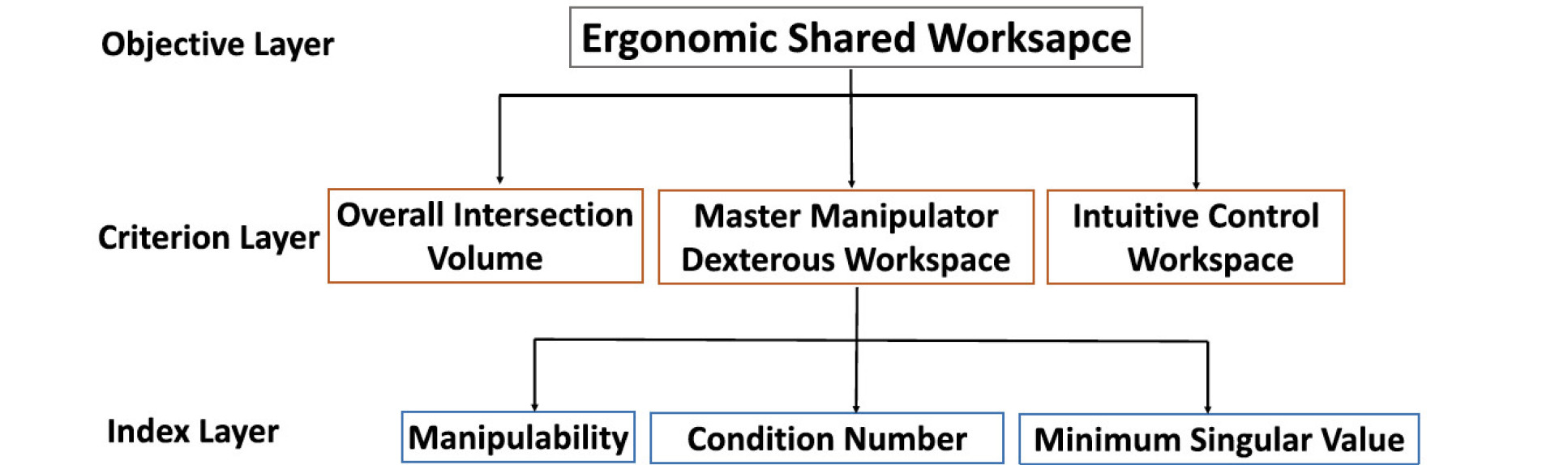 Schematic diagram of the construction of the AHP based ergonomics hared workspace analysis framework.
Schematic diagram of the construction of the AHP based ergonomics hared workspace analysis framework.The optimal master robot placement can be determined based on three criteria: 1) interaction workspace volume, 2) interaction workspace quality, and 3) intuitiveness for slave robot control.
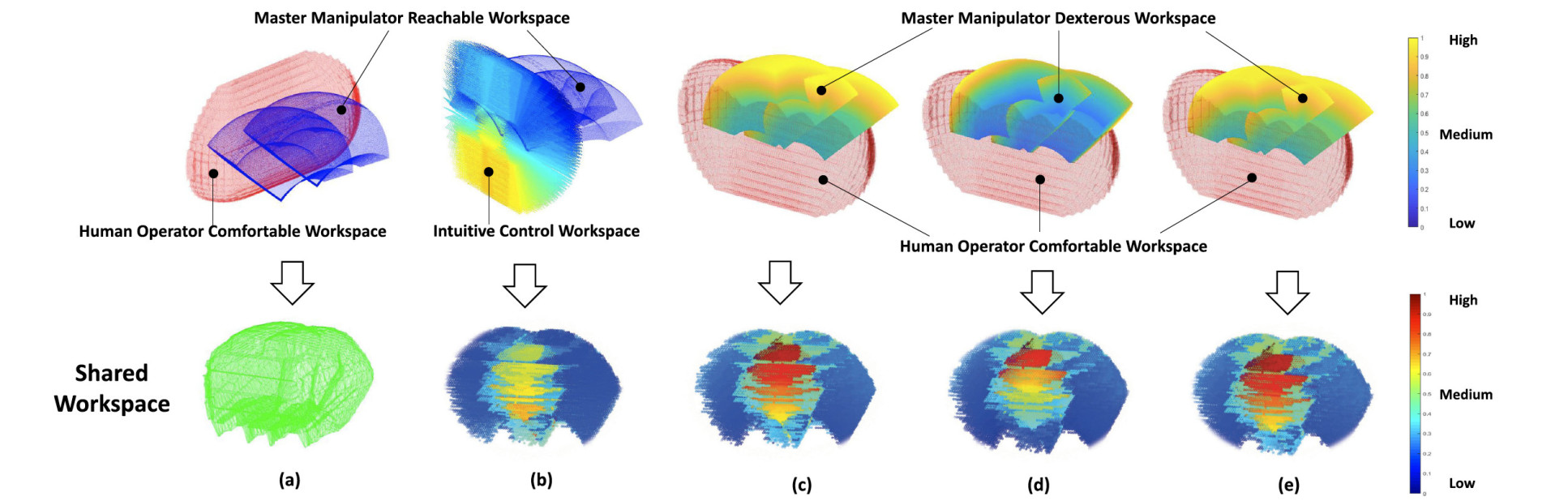 Visualisation of the ergonomic shared workspace construction process
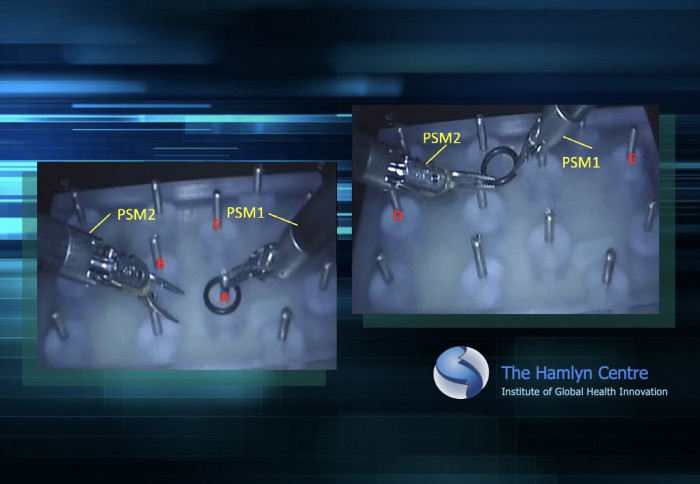
Visualisation of the ergonomic shared workspace construction processExperimental verification of the platform is conducted on a da Vinci ResearchKit (dVRK). An in-house compact master manipulator (Hamlyn CRM) is used as the master robot and the da Vinci robot is used as the slave robot.
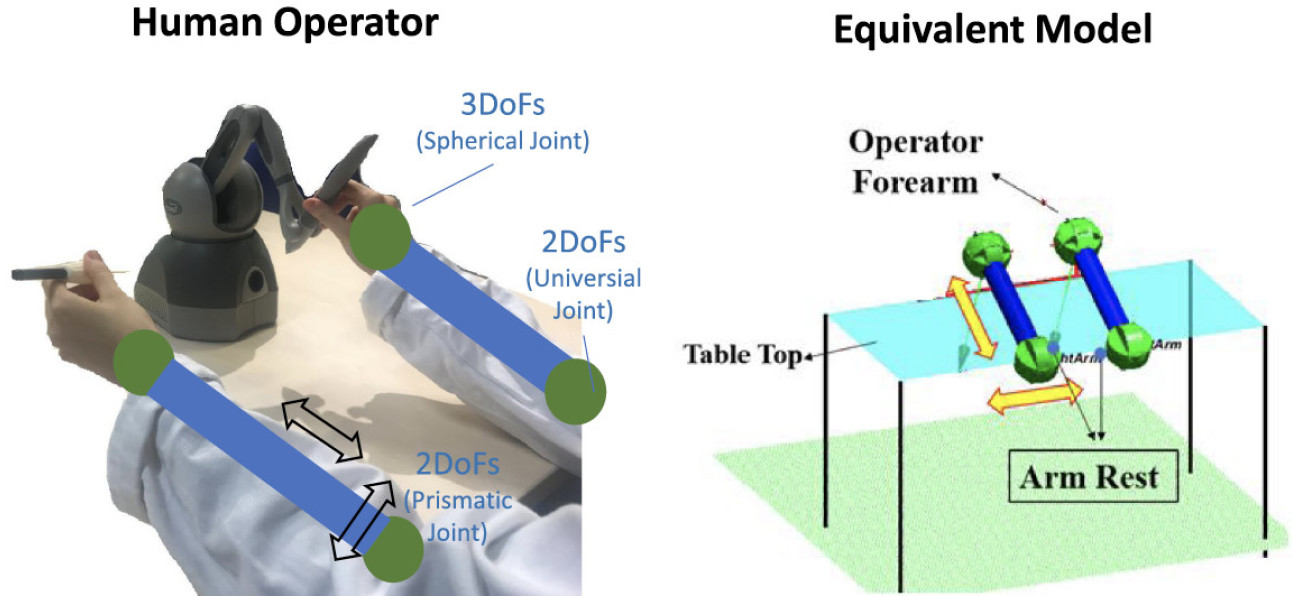
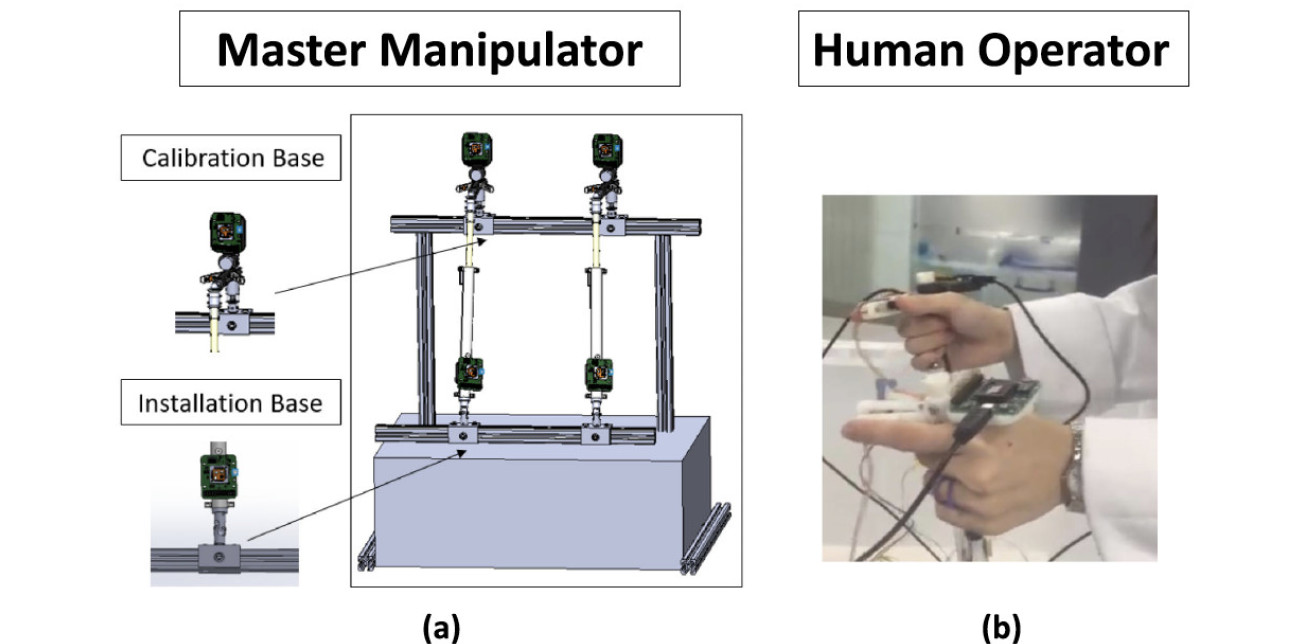 The master manipulator and the operation scenario. (a) The CAD model of the Hamlyn CRM. (b) The human operator interacted with the master manipulators.
The master manipulator and the operation scenario. (a) The CAD model of the Hamlyn CRM. (b) The human operator interacted with the master manipulators.Our researchers compared the performances between with and without using design optimisation, in order to validate the effectiveness of the ergonomic shared workspace analysis technique.
The analysis results indicate that the proposed ergonomic shared workspace analysis can improve the performance of teleoperation in terms of task completion time and the number of clutching required during operation.
In conclusion, the ergonomic workspace analysis framework proposed by our research team takes the workspace of the human operator, the slave robot and the master manipulator into consideration. In addition, the human-robot interaction of ergonomic shared workspace is calculated and analysed.
For the future work, our researchers plan to explore the high-efficiency numerical calculation method to obtain more accurate workspace quality evaluation results.
Source:
www.imperial.ac.ukOriginal Content:
https://shorturl.at/inoy6

